
La liaison
La fonction de liaison est la fonction mécanique élémentaire jouée par tout organe qui lie ensemble différentes pièces d'un objet technique.
Un objet technique comporte la plupart du temps plusieurs pièces. Ces pièces ont besoin d’être maintenues ensemble pour qu’elles puissent accomplir leur fonction. La liaison peut se faire par simple contact, mais elle nécessite généralement l'utilisation d'une pièce intermédiaire que l'on nomme organe de liaison. Ces organes (vis, clous, rivets, colle, etc.) assurent la liaison entre d'autres pièces.
Les caractéristiques des liaisons
Il existe de nombreuses façons de lier ensemble des pièces dans un objet technique. Cependant, malgré la diversité des liaisons possibles, on décrit toujours une liaison à l'aide de quatre caractéristiques. Ces caractéristiques sont basées sur les quatre paires de caractéristiques existantes. Ainsi, une liaison peut être directe ou indirecte, démontable ou indémontable, rigide ou élastique, complète ou partielle.
Liaison directe ou indirecte
- Liaison directe: Il n'y a pas d’organe de liaison entre les pièces à assembler. Ce sont des pièces de formes complémentaires qui assurent la liaison directe. Les pièces tiennent ensemble sans aide.
- Liaison indirecte: Les pièces ont besoin d'un organe de liaison pour tenir ensemble. Un ou plusieurs organes d’assemblage (vis, clou, colle, goupille, etc.) est nécessaire dans une liaison indirecte.


Liaison rigide ou élastique
- Liaison rigide: Cette liaison ne permet aucune déformation de pièces assemblées. L’organe de liaison est rigide et il ne permet aucun changement de position des pièces qu’il relie.
- Liaison élastique: Une liaison est élastique lorsqu'il y a présence d'un organe de liaison élastique ou d'un matériau élastique qui assure un mouvement de rappel (retour à la position initiale) des composants dans le fonctionnement de l’objet. On y retrouve souvent des ressorts.

Liaison démontable (non permanente) ou indémontable (permanente)
- Liaison démontable: Ce type de liaison permet de séparer plusieurs fois les pièces sans endommager les surfaces des pièces ni l’organe de liaison. Ce type de liaison est surtout utilisé pour une révision ou un remplacement de pièces. On retrouve souvent des vis et des écrous dans ce type de liaison.
- Liaison indémontable: On ne peut pas séparer les pièces sans détériorer l’organe de liaison ou les surfaces des pièces. Il s'agit d'une liaison qui est irréversible.


Liaison complète (totale) ou partielle
- Liaison complète (aussi dite totale): Lorsqu’il n’y a aucune possibilité de mouvement entre les pièces liées, la liaison est complète. Dans cette liaison, il n’y a pas de degré de liberté puisqu’aucun mouvement n’est permis.
- Liaison partielle: Une liaison est partielle lorsqu’il y a possibilité de mouvement entre les pièces. Ces liaisons sont classées suivant le nombre et la nature des mouvements relatifs. Les pièces d’une liaison partielle peuvent bouger les unes par rapport aux autres.


On peut donc décrire une liaison en déterminant les quatre caractéristiques qui la qualifient. Le tableau suivant en donne quelques exemples.



Les caractéristiques des liaisons
Les types de liaisons
Il existe plusieurs types de liaisons, selon les mouvements que peuvent avoir les pièces liées. Dans tous ces types de liaisons, à l'exception de la liaison d'encastrement, une des pièces est guidée par l'autre. Ce sont les mouvements possibles de la pièce guidée qui déterminent le type de liaison.
| Type de liaison | Exemple | Avantage | Inconvénient |
| Liaison encastrement |  Source |
Aucun degré de liberté entre les pièces (liaison complète). Peut supporter des charges élevées. |
Peut amener une déformation des pièces. |
| Liaison pivot |  Source |
Simple à réaliser. Assurer un guidage en rotation (un seul degré de liberté). |
Frottement élevé (peut nécessiter une lubrification). Guidage précis à réaliser. Vitesse de rotation limitée. |
| Liaison glissière |  Source |
Assurer un guidage en translation rectiligne (un seul degré de liberté). | Frottement élevé (peut nécessiter une lubrification). Peut limiter l'amplitude du mouvement. |
| Liaison pivot glissant |  Source |
Assurer un guidage en translation rectiligne et une rotation dans un même axe (deux degrés de liberté). | Peut limiter l'amplitude du mouvement. |
| Liaison hélicoïdale |  Source |
Assurer un déplacement horizontal d'une pièce pendant qu'on tourne une autre pièce (deux degrés de liberté dans un même axe). | Limiter les mouvement dans un seul axe. |
| Liaison rotule |  Source |
Assurer un guidage en rotation dans les trois axes (trois degrés de liberté). | Provoquer un frottement élevé (peut nécessiter une lubrification). |
| Liaison appui-plan |  source |
Assurer des mouvements parallèles au plan (trois degrés de liberté). | Limiter les mouvements à une seule dimension. |
Les degrés de liberté des liaisons
Les degrés de liberté sont les six mouvements indépendants possibles entre les pièces dans un objet technique.
Dans un objet technique, la fonction liaison peut permettre ou empêcher certains mouvements entre les pièces. Si un organe est totalement libre, c’est-à-dire qu’il n’est lié à aucun autre organe, on considère qu'il peut se déplacer dans l'espace en translation et en rotation selon les trois axes du plan cartésien (x, y et z). Cette liberté de mouvement correspond aux 6 degrés de liberté qui permettent 12 mouvements possibles.
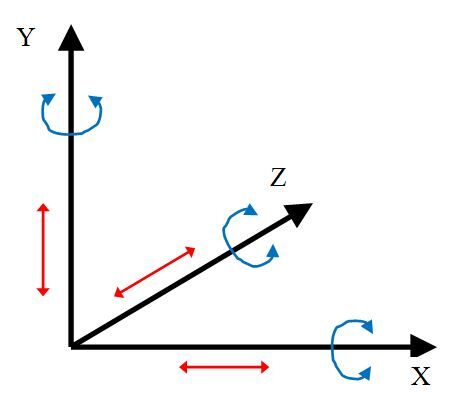
| Degrés de liberté | Mouvements associés |
| 1- Translation suivant l'axe X (Tx) | 1- Translation vers la droite |
| 2- Translation vers la gauche | |
| 2- Translation suivant l'axe Y (Ty) | 3- Translation vers le haut |
| 4- Translation vers le bas | |
| 3- Translation suivant l'axe Z (Tz) | 5- Translation vers l'avant |
| 6- Translation vers l'arrière | |
| 4- Rotation autour de l'axe X (Rx) | 7- Rotation horaire autour de l'axe X |
| 8- Rotation anti-horaire autour de l'axe X | |
| 5- Rotation autour de l'axe Y (Ry) | 9- Rotation horaire autour de l'axe Y |
| 10- Rotation anti-horaire autour de l'axe Y | |
| 6- Rotation autour de l'axe Z (Rz) | 11- Rotation horaire autour de l'axe Z |
| 12- Rotation anti-horaire autour de l'axe Z |
Les exercices
Références
